






































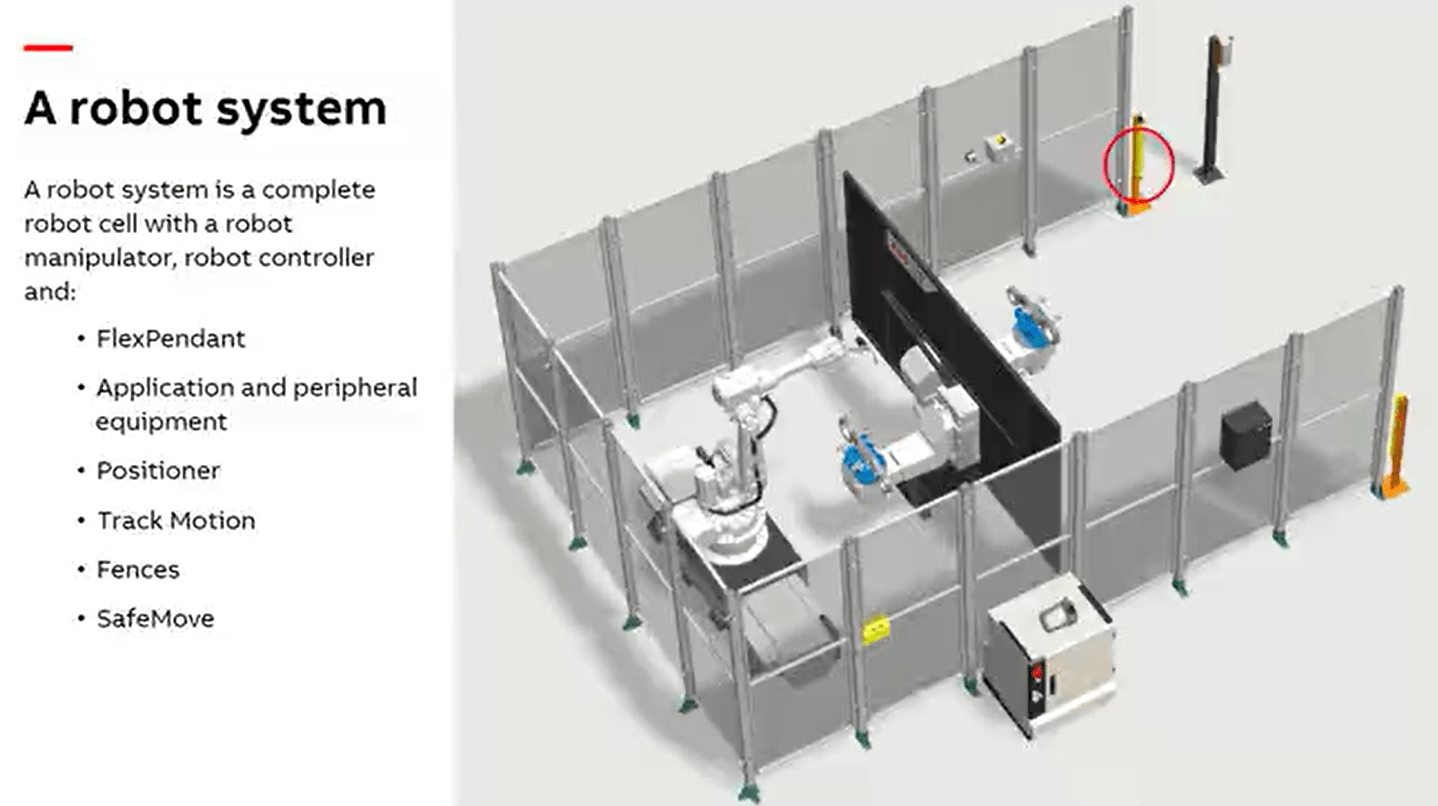
机器人系统是一个完整的机器人单元,其中包括机器人操作器、机器人控制器和柔性吊舱、应用设备及外设、定位器、轨迹运动、防护围栏和安全移动等功能部件。
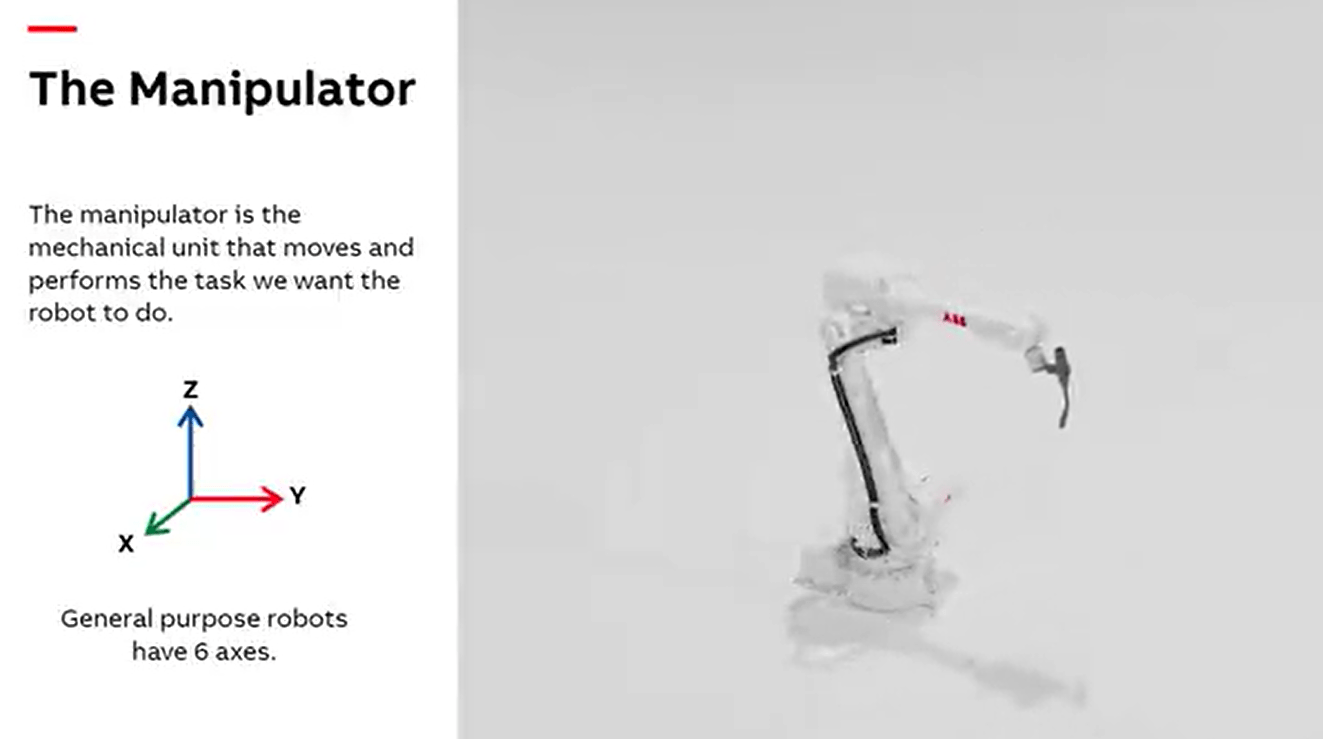
机械臂是指一种可以在不同的环境下替代人类操作,执行物理任务的机器人设备。它通常由几个关节和臂段组成,具有类似于人的臂部结构。它可以帮助我们完成一些危险或复杂的任务,如组装生产线上的物体、清洁核反应堆中的废料等。
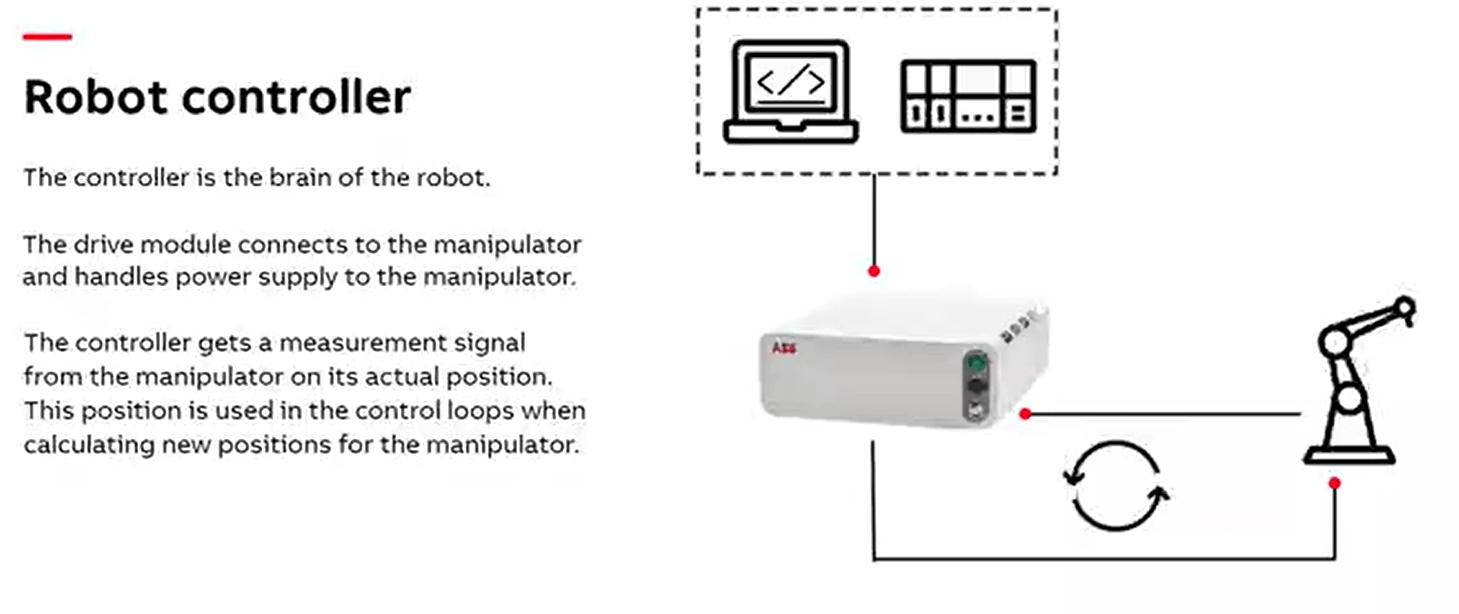
机器人控制器是机器人系统的核心部分,它主要用于控制和管理机器人的运动。它可以通过接收传感器数据、执行算法和发出指令,实现对机器人的精确控制和协调运动。它可以是硬件设备,如嵌入式电路板、PLC(可编程逻辑控制器)等;也可以是软件程序,如运行在计算机上的控制软件。
一、什么是机器人系统?
机器人系统是由多个组件组成的,包括计算机控制器、传感器、执行器和通信设备,这些组件可以协同工作以实现自动化、执行任务或提供交互式服务的机器人。
 机器人系统
机器人系统
机器人系统通常可以根据其应用范围和复杂性进行分类,最简单的机器人系统可能只有一个机器人,而更复杂的系统可能包含由多个机器人组成的群体,甚至包括由多个机器人系统组成的系统。
机器人系统在工业、医疗、军事、家庭和娱乐等领域都有广泛的应用,它们可以执行危险、重复或复杂的任务,提高工作效率、减少人为错误和提高安全性。
二、什么是机械臂?
机械臂是一种工业机器人,它由一些关节和驱动器组成,通过这些关节和驱动器,机械臂可以模仿人类手臂的动作,实现精确和可重复的定位和操作。
 机械臂
机械臂
机械臂通常被用于自动化生产线、工业制造、货物搬运和机器人焊接等领域。它们具有高速、高精度和高负载能力的特点,可以轻松完成各种复杂的任务,提高生产效率和质量。
机械臂的关节和驱动器可以通过各种方式实现,例如使用伺服电机、步进电机或气缸等。此外,机械臂还可以配备各种传感器和控制器,以实现更精确和智能化的操作。
三、什么是机器人控制器?
机器人控制器是一种专门用于控制机器人操作的计算机系统。它通过接收传感器信号,控制机器人的执行器(如电机、伺服马达等),从而使机器人完成指定的任务。
 机器人控制器
机器人控制器
机器人控制器通常具有以下功能:
1.运动控制:根据机器人的运动学、动力学和控制策略,计算并输出机器人的位置、速度和加速度等控制信号,以使机器人能够按照预定的轨迹运动。
2.逻辑控制:对机器人的工作过程进行逻辑处理,如条件判断、循环控制和故障处理等。
3.伺服控制:对机器人的执行器进行伺服控制,如PID调节、矢量控制和模糊控制等,以使机器人达到高精度的定位和速度控制。
4.通讯控制:机器人控制器通常需要与其他控制器、计算机和设备进行通信和交互,如传感器数据获取、执行器控制指令下发和机器人系统状态监控等。
5.算法处理:实现各种机器人算法,如运动规划、状态估计、机器学习、轨迹优化等。
机器人控制器可以采用嵌入式、PC式或专用式等多种架构,根据控制器的性能和功能要求,可以选择不同的硬件和软件配置。机器人控制器是机器人系统的核心部件,对整个机器人的性能、稳定性和可靠性起着至关重要的作用。
综上所述,机器人系统包括机械系统、驱动系统、控制系统和感知系统四大部分,其中机械臂是一种可以代替人类操作的机器人设备,而机器人控制器则是机器人系统的核心部分,用于控制和管理机器人的运动。总之,机器人系统、机械臂、机器人控制器是相互关联的技术领域,它们在自动化操作、生产制造等领域都有广泛的应用前景。随着技术的不断发展,这些领域的性能和功能也将不断提升和完善。
想要了解更多工业机器人、自动化、智能制造、人工智能、数字化产业升级等资讯案例,欢迎关注或搜索“工博士”










