有效负载与机器人臂距:控制虚拟机器人的关键要素
本文介绍了机器人领域的三个重要概念:有效负载、臂距和控制方式。有效负载指机器人能够承载的最大质量,臂距是机器人两臂伸展时中指间的距离。控制机器人的方式多种多样,包括编程控制、遥控、语音控制、AI控制、视觉引导和物理交互等。通过掌握这些知识,我们可以更好地理解和应用机器人技术。
什么是有效负载?
 机器人有效负载
机器人有效负载
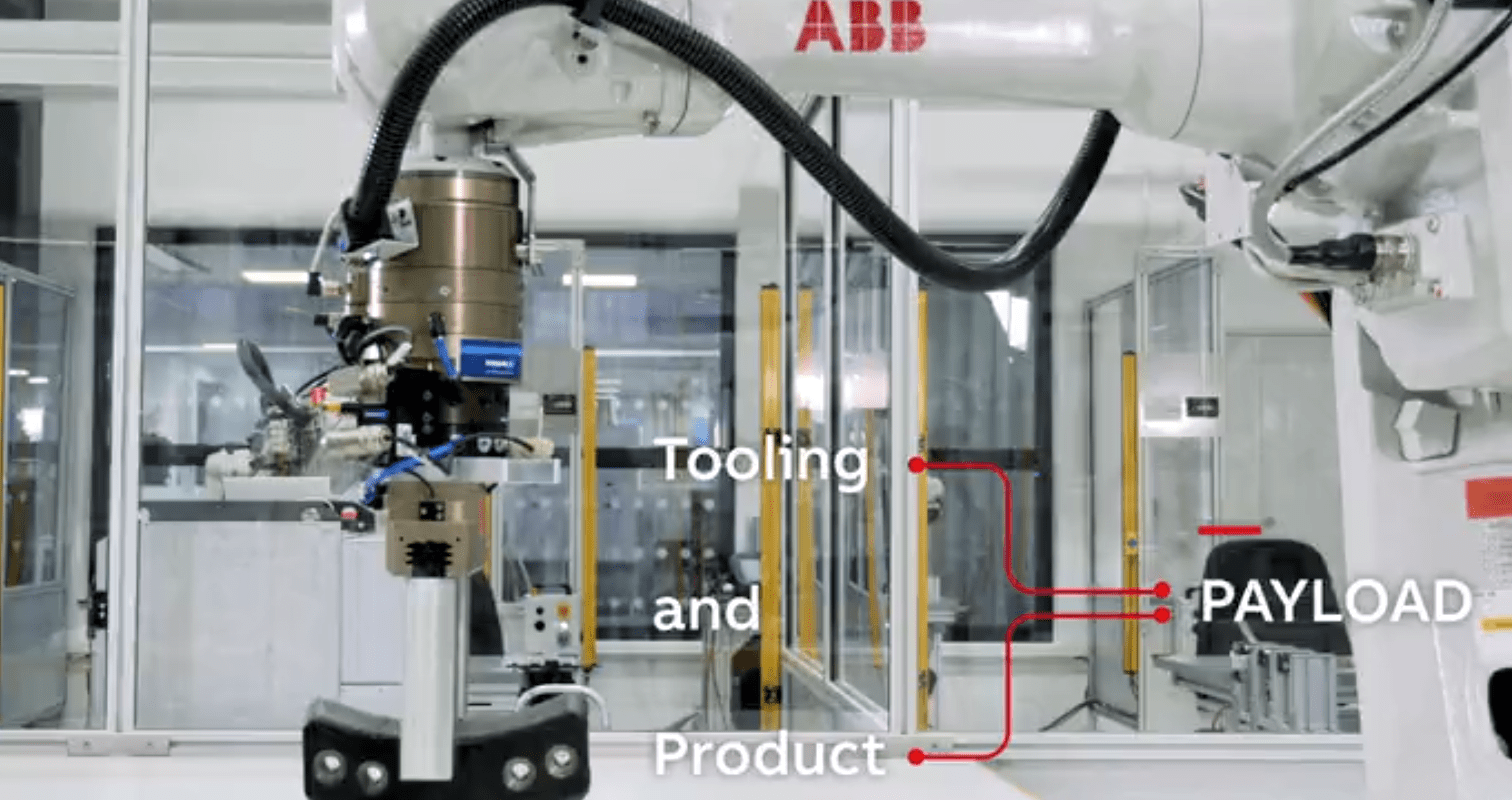
有效负载是指机器人工作空间内可以携带的最大负荷,也就是机器人实际能够搬运的工件或物品的重量。在选择机器人进行物料搬运时,必须考虑将工件的重量以及机器人手爪的重量加总到其工作负荷中。
机器人有效负载是指机器人在执行任务时,被机器人抓取或携带的物体质量。这个质量通常以千克(kg)为单位。机器人有效负载可以包括物体本身的质量,以及物体被携带或运输过程中所需克服的摩擦力、空气阻力等。
在机器人设计和应用中,有效负载是非常重要的参数,它直接影响机器人的运动性能、作业效率、承载能力以及机器人的整体设计。确定有效负载需要考虑机器人的运动方式、承载能力、作业任务和环境条件等多种因素。
例如,在工业自动化生产线中,机器人需要根据生产任务的不同,携带不同的工件、工具或其他物品,这时有效负载就是机器人需要承载的物体质量。在服务机器人中,有效负载可能包括需要被机器人抓取和移动的餐具、食品、饮料等物品的质量。在军事和救援机器人中,有效负载可能包括需要被机器人搬运的武器、设备、药品等物品的质量。
什么是臂距?
 机器人臂距
机器人臂距
机器人臂距是指机器人手臂或机械手在运动过程中,机械手或手臂末端工具与目标物体之间的距离。这个距离通常用毫米或厘米来度量,是机器人设计和运动控制领域的重要参数之一。
在机器人设计中,臂距的确定需要考虑机器人的整体结构、运动方式、传动机构、动力系统、传感器、控制器等多种因素。臂距的大小直接影响机器人的工作空间、运动速度、精度、稳定性、能耗等多种性能指标。
此外,机器人臂距和人体臂距是两个概念。机器人臂距通常是指机器人机械手臂的长度,而人体臂距是指人体上臂和下臂之间的长度。
如何控制您的机器人?
 控制机器人
控制机器人
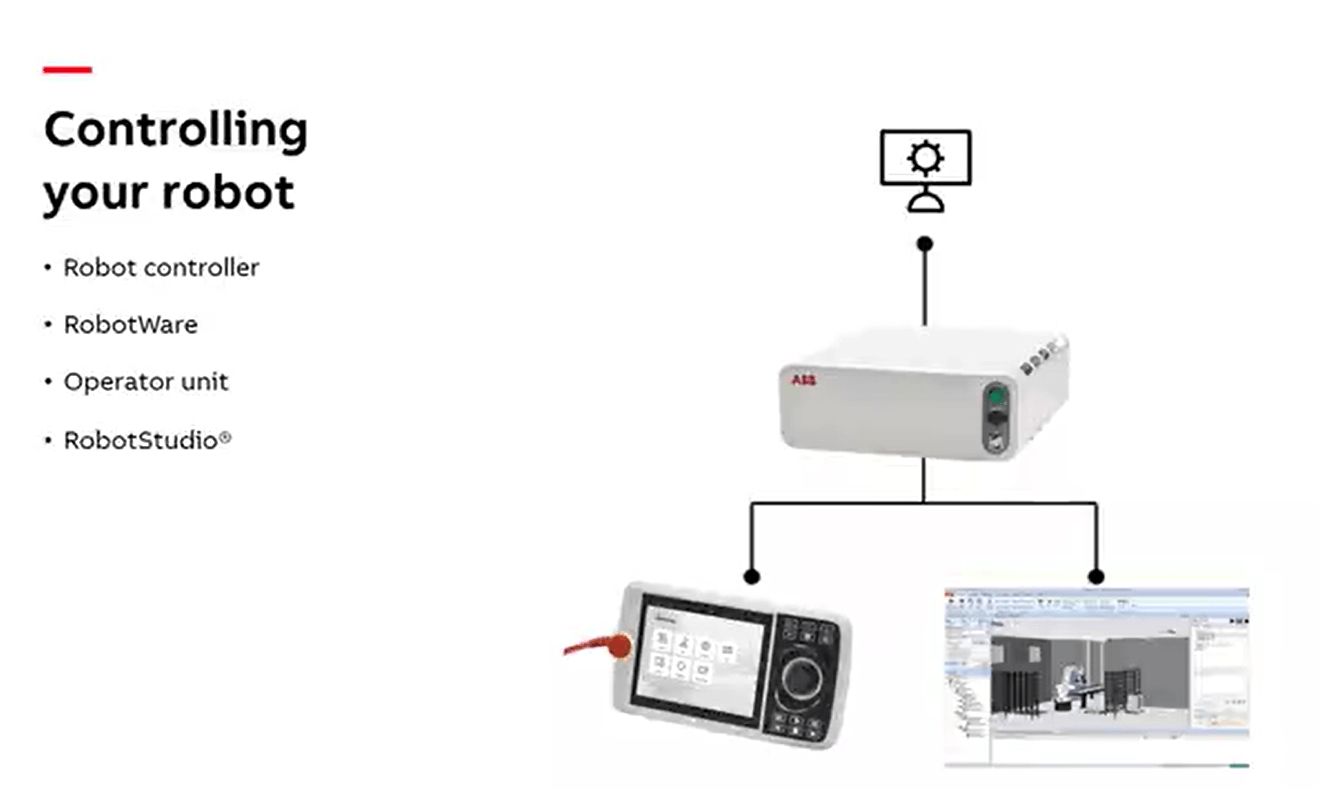
不同的机器人可能有不同的控制方式和指令集,具体操作方式需要根据机器人的说明书或者相关文档进行了解和操作。同时,对于较为复杂的机器人,可能需要专业的技术人员进行编程和操作。
控制机器人的方法取决于机器人的类型、用途和工作环境。一般情况下,控制机器人需要以下几个步骤:
1.设定目标:明确机器人的任务目标,例如执行特定操作、移动到特定位置等。
2.编程:为机器人编写程序,指定它完成目标任务所需的步骤、行为和动作。机器人通常由程序员使用编程语言(如Python、C++等)来编写程序。
3.发送指令:通过通信接口,如Wi-Fi、蓝牙、USB等,将程序发送到机器人。机器人接收到程序后,开始执行任务。
4.监控与调整:通过观察机器人的表现,可以实时监控任务执行进度,必要时进行调整。
5.回收与维护:任务完成后,回收机器人,进行维护,为下一次任务做好准备。
需要注意的是,控制机器人的具体方法取决于机器人的硬件和软件配置、通信能力以及任务需求等因素。有时,控制机器人可能需要专业知识,甚至可能需要开发定制的解决方案。
本文介绍了有效负载和机器人臂距的概念,并强调了它们在机器人领域中的重要性。有效负载是指机器人手臂能够携带的最大重量,它可以帮助确定机器人的最大承载能力。而臂距则是指机器人手臂各关节之间的距离,它可以用来计算机器人的位置,并且可以在机器人运动学中起到重要作用。此外,本文还解释了如何使用自然语言指令来控制虚拟机器人,以实现更高效的任务执行。








