 工业机器人+工博士地轨/导轨/第七轴
工业机器人+工博士地轨/导轨/第七轴
一、工业机器人轴数的定义与意义
工业机器人的轴数,通常用“自由度”这一专业术语来解释。自由度指的是机器人能够独立运动的维度数量。例如,三轴机器人具有三个自由度,可以沿X、Y、Z轴自由运动,但无法倾斜或转动。随着轴数的增加,机器人的灵活性也相应提高,能够完成更复杂的任务。
二、三、四、五、六轴机器人的特点
- 三轴机器人(直角坐标或笛卡尔机器人)
- ●特点:三轴机器人沿X、Y、Z三个直线轴运动,适用于简单的搬运工作。
- ●应用:常用于物料搬运、码垛等简单自动化作业。
- 四轴机器人(如SCARA机器人)
- ●特点:除了X、Y、Z轴的运动外,还增加了一个独立运动的第四轴,通常用于高速取放作业。
- ●应用:在电子、包装等行业广泛应用,擅长高速、高精度的物料搬运和装配。
- 五轴机器人
- ●特点:通过X、Y、Z三个空间轴进行转动,同时依靠基座上的轴实现转身动作,以及手部灵活转动的轴,增加了灵活性。
- ●应用:适用于需要多方向转动的复杂装配任务,如汽车制造中的零部件安装。
- 六轴机器人
- ●特点:六轴机器人可以穿过X、Y、Z轴,且每个轴都能独立转动,具有极高的灵活性。
- ●应用:广泛应用于电子、汽车、航空航天等领域,能够完成复杂的装配、焊接、喷涂等任务。
三、机器人第七轴的特点与应用
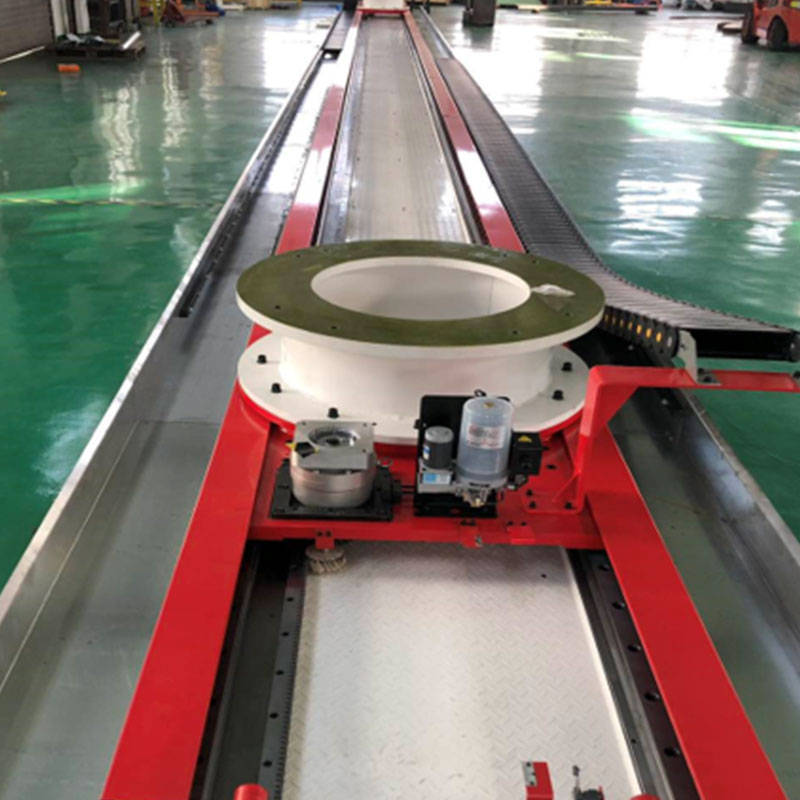
定义:机器人第七轴并非传统意义上的机器人本体的一部分,而是指安装在行走轴导轨上,用于连接和移动工业机器人的附加装置。这种机构允许机器人从一个工位移动到另一个工位,实现多工位作业。
特点:
- ●多自由度运动:第七轴提供了额外的自由度,使机器人能够在更大的空间范围内灵活移动。
- ●高精度与可靠性:采用全伺服动力系统,实现速度快、精度高,并具备防尘、防污设计,适用于恶劣环境。
- ●长行程应用:适用于机床工件上下料、焊接、装配、喷涂等多种长行程作业。
应用:
- ●生产线自动化:在自动化生产线上,第七轴机器人能够高效地在多个工位间移动,完成不同工序的作业。
- ●空间受限环境:在狭窄或复杂的工作环境中,第七轴机器人能够灵活避障,完成传统机器人难以完成的任务。
四、总结
机器人第七轴与三、四、五、六轴机器人在结构、功能和应用场景上存在显著差异。三、四、五、六轴机器人主要通过增加轴数来提高灵活性,适用于不同复杂度的工业任务;而第七轴则作为连接和移动工业机器人的附加装置,扩展了机器人的工作范围和灵活性。随着工业自动化技术的不断发展,这些机器人将在更多领域发挥重要作用,推动制造业向智能化、高效化方向迈进。





